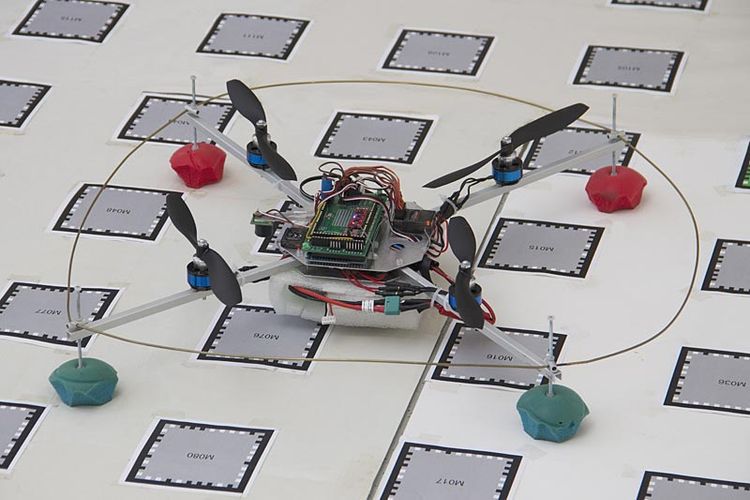
Noch orientiert sich der Quadcopter mit Hilfe visueller Codes am Boden, in Zukunft soll er sich aber autonom zurechtfinden.
Wien - Einen Quadcopter, der sich mit einem Smartphone als "Pilot" völlig autonom im Raum zurechtfindet, haben Wissenschafter der Technischen Universität (TU) Wien entwickelt. Das kleine viermotorige Fluggerät kann sich ohne menschliche Steuerung bewegen und muss auch nicht auf die Rechenleistung eines am Boden stehenden Computers zurückgreifen. Ein handelsübliches Smartphone als "Pilot" schafft die gesamte notwendige Rechenleistung direkt an Bord, teilte die TU am Montag in einer Aussendung mit.
Das digitale Erfassen visueller Daten ist einer der Schwerpunkte des Virtual-Reality-Teams der TU Wien. "Es war für uns also eigentlich ein logischer Schritt, uns in Richtung Robotik weiterzuentwickeln und mal eine Kamera auf einen Quadcopter zu packen", erklärte Hannes Kaufmann vom Institut für Softwaretechnik und Interaktive Systeme.
Die Techniker wollten im Rahmen des Projekts ein möglichst simples, kostengünstiges Gerät herstellen. Die Materialkosten betrugen weniger als tausend Euro. Das Herzstück - und gleichzeitig teuerster Bestandteil - ist ein Smartphone. Es liefert über die Kamera die nötigen Bilder und dient gleichzeitig als Steuerzentrale, wobei die ganze Intelligenz des Fluggeräts in eine Smartphone-App gepackt werden konnte.
Visuelle Codes am Boden zur Orientierung
Ein Micro-Controller sorgt für die Feinabstimmung der Rotor-Bewegung, um den Flug zu stabilisieren. Das Fluggerät orientiert sich ausschließlich durch visuelle Daten. Dazu benötigt es derzeit noch visuelle Codes am Boden, die ähnlich wie QR-Codes funktionieren. Im Flug erkennt der Quadcopter die Codes und erzeugt nach und nach eine virtuelle Landkarte seiner Umgebung. Hat er sich erst mal orientiert, kann er ganz gezielt bestimmte Orte ansteuern oder sich zu Regionen bewegen, die er noch nicht so gut kennt.
"Das Ziel ist, dass der Quadcopter in Zukunft auch ohne diese Codes auskommt und sich anhand von natürlich vorkommenden Orientierungspunkten, die aus den Kameradaten und auch von Tiefensensoren wie der MS Kinect gewonnen werden sollen, in der Umgebung zurechtfindet", sagte Annette Mossel, die Chefdesignerin des Geräts. An Anwendungsideen mangelt es den Wissenschaftern nicht: Feuerwehrleute könnten das Fluggerät in ein brennendes Gebäude schicken und sich ein Bild der Umgebung senden lassen, bevor sie selbst hineingehen. Quadcopter könnten in großen Gebäuden Menschen an die richtige Stelle leiten. Durch die geringen Kosten könnte ein solches Fluggerät auch in ärmeren Regionen eingesetzt werden und etwa Auskunft über Waldrodungen geben. (APA, 19.8.2013)